در این محتوا، به بررسی مشکلات رایج و روند تعمیر کنترلرها و کامپیوترهای رباتهای صنعتی ABB میپردازیم. این رباتها در صنایع مختلف برای انجام وظایف پیچیده و تکراری بهکار میروند و عملکرد صحیح آنها برای بهبود کارایی و دقت فرآیندهای تولیدی حیاتی است.
مشکلات رایج در کنترلرها و کامپیوترهای رباتهای ABB:
-
روشن نشدن یا بوت نشدن کنترلر: این مشکل ممکن است بهدلیل خرابی در منبع تغذیه، مادربرد یا اجزای الکترونیکی داخلی کنترلر باشد.
-
نمایش خطا در هنگام اجرای برنامه: خطاهای نرمافزاری یا مشکلات در حافظه میتوانند منجر به این مسئله شوند.
-
عدم ارتباط با بخشهای ورودی/خروجی (I/O): این مشکل ممکن است ناشی از خرابی در پورتها، کابلها یا ماژولهای I/O باشد.
-
مشکل در سیستم فیدبک و دقت ربات: خرابی سنسورها یا ماژولهای فیدبک میتواند باعث کاهش دقت حرکات ربات شود.
-
از کار افتادن بخش کنترل بازو یا درایو: این مشکل ممکن است بهدلیل خرابی در درایوها، موتورها یا سیستمهای کنترلی مرتبط باشد.
روند تعمیر کنترلرها و کامپیوترهای رباتهای ABB:
-
جداسازی دستگاه از منبع تغذیه: اولین گام در تعمیر هر دستگاه الکترونیکی، قطع اتصال آن از منبع برق برای جلوگیری از خطرات احتمالی است.
-
بررسی اولیه و عیبیابی: تکنسینهای متخصص با استفاده از تجهیزات تخصصی، به شناسایی قطعات معیوب و مشکلات موجود میپردازند.
-
تعمیر یا تعویض قطعات معیوب: پس از شناسایی مشکلات، قطعات معیوب تعمیر یا در صورت لزوم تعویض میشوند.
-
تست و کالیبراسیون: پس از تعمیر، دستگاه تحت تستهای مختلف قرار میگیرد تا از عملکرد صحیح آن اطمینان حاصل شود. در صورت نیاز، کالیبراسیونهای لازم انجام میشود.
-
نصب مجدد و راهاندازی: در نهایت، دستگاه به سیستم بازگردانده شده و راهاندازی میشود تا عملکرد آن در شرایط واقعی بررسی شود.
نمونهای از تعمیر کنترلر و کامپیوتر ربات ABB:
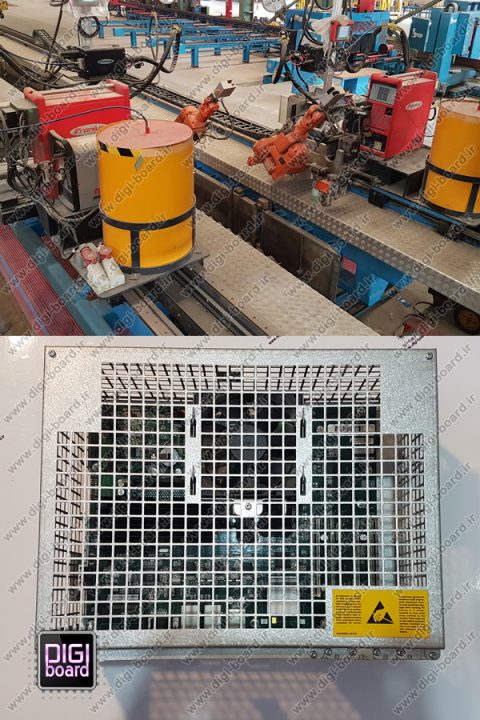
در یکی از پروژههای انجامشده توسط شرکت دیجی برد، کامپیوتر کنترلی مربوط به یک ربات جوشکاری ABB که وظیفه کنترل دو بازوی ربات را بر عهده داشت، دچار خرابی شده بود. این کامپیوتر از یکی از شرکتهای فولاد برای تعمیر ارسال شد. پس از انجام مراحل عیبیابی و تعمیرات لازم، دستگاه با موفقیت تعمیر و به مشتری تحویل داده شد.
توجه به این نکته ضروری است که سپردن تعمیرات به تکنسینهای غیرمتخصص میتواند منجر به خرابیهای بیشتر و حتی غیرقابل تعمیر شدن دستگاه شود. بنابراین، در صورت بروز هرگونه مشکل در کنترلرها و کامپیوترهای رباتهای صنعتی ABB، توصیه میشود به مراکز تخصصی و معتبر مراجعه نمایید.
–
–
–
–
–
در صنایع پیشرفته امروز، رباتهای صنعتی ABB به عنوان ستون فقرات فرآیندهای تولید، جوشکاری، مونتاژ و جابجایی شناخته میشوند. کنترلرها و کامپیوترهای ربات ABB مغز متفکر این سیستمها هستند که وظیفه پردازش دستورات، مدیریت حرکت دقیق بازوها و هماهنگی با سایر تجهیزات کارخانه را بر عهده دارند. با توجه به پیچیدگی و حساسیت این تجهیزات، بروز هرگونه اختلال در عملکرد آنها، میتواند منجر به توقف خط تولید و زیانهای سنگین شود.
در این راهنمای فنی و عملی، به بررسی عمیق ساختار کنترلی رباتهای ABB، عیبیابی پیشرفته، مراحل عملیاتی دقیق تعمیر و ابزارهای مورد نیاز برای تعمیر کنترلر و کامپیوتر ربات ABB خواهیم پرداخت.
ساختار کنترلی رباتهای ABB (بررسی مدلهای رایج)
رباتهای ABB از نسلهای مختلفی از کنترلرها استفاده میکنند که شناخت آنها برای تعمیرات تخصصی حیاتی است. معمولترین کنترلرهای مورد استفاده در صنعت عبارتند از:
کنترلرهای سری S4 و S4C/S4C+
این کنترلرها از نسلهای قدیمیتر هستند که هنوز در بسیاری از خطوط تولید فعالند.
- S4 (مانند M94A، M94B): بر پایه معماری سختافزاری سادهتر و پردازندههای VME Bus.
- S4C/S4C+ (مانند M2000): شامل کامپیوتر صنعتی بر پایه پردازندههای Intel و مادربردهای تخصصی، با تمرکز بر سیستم عاملهای اختصاصی ABB. عیبیابی اغلب نیازمند شناخت ماژولهای ورودی/خروجی (I/O) مبتنی بر Fieldbus و اتصالات T-Adapter است.
کنترلرهای سری IRC5 (IRC5 Single Cabinet, IRC5 Compact)
IRC5 پرکاربردترین کنترلر ABB است که عملکردی مبتنی بر معماری کامپیوتری پیشرفته دارد.
- کامپیوتر کنترلی (Controller Computer): قلب IRC5 که شامل بردهای اصلی مانند Main Computer Board (MOC/CPU) و Drive Module است.
- Drive Module (DSM): بخش کنترل حرکت که درایورهای موتورها را مدیریت میکند.
- بردهای ورودی/خروجی (I/O Boards): شامل ماژولهای دیجیتال و آنالوگ که ارتباط با تجهیزات جانبی را فراهم میسازند.
- سیستم عامل (RobotWare): یک سیستم عامل چند وظیفهای که بر روی سختافزار کامپیوتر اجرا میشود.
در این محتوا، به بررسی مشکلات رایج و روند تعمیر کنترلرها و کامپیوترهای رباتهای صنعتی ABB میپردازیم. این رباتها در صنایع مختلف برای انجام وظایف پیچیده و تکراری بهکار میروند و عملکرد صحیح آنها برای بهبود کارایی و دقت فرآیندهای تولیدی حیاتی است.
مشکلات رایج در کنترلرها و کامپیوترهای رباتهای ABB: عیبیابی ریشهای
شناسایی دقیق علل ریشهای (Root Cause Analysis) یک مرحله کلیدی در تعمیرات تخصصی است. صرفاً رفع علامتهای ظاهری مشکل، تضمینکننده عملکرد بلندمدت نیست.
۱. روشن نشدن یا بوت نشدن کنترلر (No Power/No Boot)
این مشکل ممکن است بهدلیل خرابی در منبع تغذیه، مادربرد یا اجزای الکترونیکی داخلی کنترلر باشد.
علل ریشهای احتمالی روشن یا بوت نشدن:
- خرابی منبع تغذیه (Power Supply Unit – PSU): اغلب ناشی از فرسودگی خازنها، نوسانات برق یا سوختن ترانزیستورهای قدرت است. در کنترلرهای IRC5، ماژول Power Distribution Module (PDM) و Main Power Supply باید بررسی شوند.
- خرابی مادربرد/برد اصلی (MOC/CPU): ایرادات در چیپستهای حیاتی، BIOS/Firmware یا اجزای تنظیمکننده ولتاژ (VRM) میتواند مانع از فرآیند بوت شود. در IRC5، خرابی برد MOC (Main Computer Board) رایج است.
- مشکلات اتصال و کابلکشی داخلی: اتصالات نامطمئن یا کابلهای آسیبدیده (مانند کابلهای Flat) بین اجزای مختلف.
مراحل عملیاتی عیبیابی:
- بررسی ولتاژهای خروجی PSU: با استفاده از یک مولتیمتر دقیق (True RMS Multimeter)، ولتاژهای خروجی (مانند ±12V, 5V, 3.3V) را در نقاط تست (Test Points) مشخص شده کنترلر اندازهگیری کنید.
- بررسی کدهای خطای LED: در بسیاری از بردهای ABB، LEDهای وضعیت (Status LEDs) کدهای خطای بوت را نمایش میدهند. مستندات فنی کنترلر برای تفسیر این کدها ضروری است.
- تست ولتاژهای روی برد: ولتاژهای حیاتی مانند ولتاژ باتری RTC (Real-Time Clock) و ولتاژهای ورودی/خروجی رگولاتورهای ولتاژ روی برد را بررسی کنید.
۲. نمایش خطا حین اجرای برنامه (Run-Time Errors)
خطاهای نرمافزاری یا مشکلات در حافظه میتوانند منجر به این مسئله شوند.
علل ریشهای احتمالی نمایش خطا:
- خرابی حافظه (RAM/Compact Flash/SSD): سکتورهای خراب یا تراشههای حافظه معیوب میتوانند منجر به از دست رفتن دادههای برنامه یا ناپایداری سیستم عامل (RobotWare) شوند.
- اختلال در سیستم عامل (RobotWare): آسیب دیدن فایلهای سیستمی یا وجود نسخههای ناسازگار نرمافزاری پس از بهروزرسانی ناموفق.
- گرمای بیش از حد (Overheating): خرابی فنها، گرفتگی فیلترها یا اختلال در سیستم خنککننده میتواند باعث ناپایداریهای حرارتی پردازنده و در نتیجه خطاهای سیستمی متناوب شود.
مراحل عملیاتی عیبیابی:
- بررسی لاگ خطا (Event Log): در محیط Service Menu کنترلر، لاگهای خطا را بررسی کنید. کدهای خطا (مانند 38209 Memory Error) سرنخهای مهمی به دست میدهند.
- تست حافظه: در صورت امکان، با استفاده از ابزارهای تشخیصی (Diagnostic Tools) داخلی یا خارجی، سلامت تراشههای RAM و ماژول حافظه اصلی را تست کنید.
- بررسی دمای سیستم: در کنترلرهای جدیدتر (IRC5)، دمای داخلی سیستم را از طریق محیط FlexPendant یا نرمافزارهای مانیتورینگ چک کنید.
۳. عدم ارتباط با بخشهای ورودی/خروجی (I/O Communication Failure)
این مشکل ممکن است ناشی از خرابی در پورتها، کابلها یا ماژولهای I/O باشد.
علل ریشهای احتمالی عدم برقراری ارتباط:
- خرابی ماژول I/O: سوختن مدارهای محافظ یا تراشههای بافر در اثر اتصال کوتاه یا ورود ولتاژهای غیرمجاز از سنسورها/اکچویتورهای خارجی.
- خرابی ارتباط فیلدباس (Fieldbus Communication): مشکل در بردهای رابط شبکه (مانند BoardNet یا Fieldbus Adapter) یا تنظیمات آدرسدهی (Addressing) اشتباه.
- مشکلات فیزیکی پورت: آسیب فیزیکی به کانکتورها (مانند پورتهای اترنت یا DeviceNet).
مراحل عملیاتی عیبیابی:
- بررسی وضعیت LEDهای I/O: LEDهای وضعیت ماژولهای I/O، وضعیت ارتباط (Comm Status) و وضعیت خطاهای داخلی (Internal Fault) را نشان میدهند.
- تست ارتباط شبکه: با استفاده از اسیلوسکوپ (Oscilloscope)، سیگنالهای پروتکلهای صنعتی (مانند CAN Bus, Profibus) را روی باس ارتباطی بررسی کنید تا نویز یا اختلالات سیگنال مشخص شوند.
- تست ایزولاسیون: ایزولاسیون الکتریکی بین بخشهای مختلف I/O و بدنه کنترلر را با استفاده از میگر (Megohmmeter) بررسی کنید تا نشتی جریان مشخص شود.
۴. مشکل در سیستم فیدبک و دقت ربات (Feedback and Accuracy Issues)
خرابی سنسورها یا ماژولهای فیدبک میتواند باعث کاهش دقت حرکات ربات شود.
علل ریشهای احتمالی فیدبک و دقت:
- خرابی انکودر (Resolver/Absolute Encoder): این سنسورها موقعیت مفصل ربات را به کنترلر فیدبک میدهند. خرابی میتواند ناشی از آسیب مکانیکی یا سوختن مدارهای الکترونیکی داخلی باشد.
- اختلال در ماژول اندازهگیری (Measurement Board): بردهایی که سیگنالهای آنالوگ انکودر را دیجیتالی میکنند و برای پردازش به MOC ارسال میکنند، ممکن است دچار خطا شوند. (مانند برد Resolver Interface در برخی مدلها).
- نویز الکترومغناطیسی (EMI): نویز شدید در محیط کارخانه میتواند سیگنالهای فیدبک را مختل کند و باعث خطاهای موقعیتی متناوب شود.
مراحل عملیاتی عیبیابی:
- بررسی مقاومت سیمپیچهای انکودر: مقاومت سیمپیچهای سیگنالی و تحریک انکودر را با مشخصات فنی کارخانه مقایسه کنید. هرگونه انحراف شدید نشاندهنده خرابی داخلی است.
- بررسی سیگنالهای فیدبک با اسیلوسکوپ: در نقاط تست ماژول اندازهگیری، شکل موجهای سینوسی/کسینوسی یا پالسهای دیجیتال انکودر را بررسی کنید.
۵. از کار افتادن بخش کنترل بازو یا درایو (Drive/Axis Control Failure)
این مشکل ممکن است بهدلیل خرابی در درایوها، موتورها یا سیستمهای کنترلی مرتبط باشد.
علل ریشهای احتمالی خرابی بازو یا درایور:
- خرابی درایو موتور (Axis Drive Unit): سوختن ترانزیستورهای IGBT در پل قدرت درایو، اغلب به دلیل بار بیش از حد، اتصال کوتاه خروجی یا فرسودگی.
- خرابی سنسور جریان (Current Sensor): این سنسورها جریان موتور را به ماژول کنترل بازو فیدبک میدهند. خرابی آنها میتواند منجر به حفاظتهای کاذب و توقف درایو شود.
- اختلال در مدار لینک DC: مشکلات در خازنهای لینک DC درایوها میتواند باعث کاهش توان و عدم حرکت محورها شود.
مراحل عملیاتی عیبیابی:
- تست IGBTها: با مولتیمتر در حالت تست دیود، سلامت ترانزیستورهای IGBT درایو را بدون اعمال ولتاژ بررسی کنید.
- بررسی کابلهای موتور: کابلهای قدرت و فیدبک موتور را برای وجود شکستگی، پارگی یا اتصال کوتاه به زمین بررسی کنید.
ابزارها و تجهیزات تخصصی مورد نیاز برای تعمیرات
تعمیر کنترلر و کامپیوتر ربات ABB نیازمند تجهیزات پیشرفتهای فراتر از ابزارهای عمومی الکترونیک است.
روند تعمیر کنترلرها و کامپیوترهای رباتهای ABB: تشریح فنی مراحل
روند تعمیرات تخصصی شامل مراحل دقیق و مستندسازی شده است تا بالاترین سطح کیفیت تضمین شود.
۱. جداسازی دستگاه از منبع تغذیه (انجام ایمن)
اولین گام در تعمیر هر دستگاه الکترونیکی، قطع اتصال آن از منبع برق برای جلوگیری از خطرات احتمالی است.
- خاموش کردن ایمن: ابتدا کنترلر از طریق FlexPendant خاموش شود.
- قطع اتصال فیزیکی: قطع کلید اصلی برق و اطمینان از دشارژ شدن کامل خازنهای لینک DC در درایوها. این خازنها میتوانند تا چند دقیقه پس از قطع برق، ولتاژهای خطرناکی را در خود نگه دارند.
- اتصال به سیستم تخلیه الکترواستاتیک (ESD): استفاده از مچبند و سطح کار ضد الکتریسیته ساکن برای جلوگیری از آسیب به قطعات حساس.
۲. بررسی اولیه و عیبیابی جامع (تشخیص سطح ماژول و قطعه)
تکنسینهای متخصص با استفاده از تجهیزات تخصصی، به شناسایی قطعات معیوب و مشکلات موجود میپردازند.
عیبیابی سطح ماژول (Module Level):
- تعیین ماژول خراب (PSU، MOC، Drive، I/O) بر اساس کدهای خطا و LEDهای وضعیت.
- جداسازی ماژول مشکوک برای بررسی دقیقتر.
عیبیابی سطح قطعه (Component Level):
- بازرسی چشمی دقیق: شناسایی سوختگیها، تغییر رنگ، ترکخوردگی در خازنها، مقاومتها و تراشههای SMD.
- تستهای الکتریکی: انجام تستهای دقیق ولتاژ، جریان و مقاومت روی قطعات مشکوک با استفاده از ابزارهای تخصصی ذکر شده (مولتیمتر، اسیلوسکوپ، تستر قطعات).
۳. تعمیر یا تعویض قطعات معیوب (اصول فنی)
پس از شناسایی مشکلات، قطعات معیوب تعمیر یا در صورت لزوم تعویض میشوند.
- تعمیر حرفهای (Rework): شامل تعویض تراشههای BGA/SMD، رگولاتورهای ولتاژ، خازنهای الکترولیتی و تراشههای اپتوکوپلر با استفاده از ایستگاه لحیمکاری هوای گرم.
- استفاده از قطعات اصلی: برای قطعات حیاتی مانند IGBTها، پردازندهها یا چیپستها، از قطعات اصلی و با کیفیت صنعتی استفاده شود تا از عملکرد پایدار در شرایط سخت صنعتی اطمینان حاصل شود.
۴. تست و کالیبراسیون (Verification and Validation)
پس از تعمیر، دستگاه تحت تستهای مختلف قرار میگیرد تا از عملکرد صحیح آن اطمینان حاصل شود. در صورت نیاز، کالیبراسیونهای لازم انجام میشود.
- تست عملکردی (Functional Test): تست ماژول تعمیر شده در یک شبیهساز یا روی کنترلر اصلی.
- تست تحت بار حرارتی (Thermal Load Test): اعمال بار عملیاتی به کنترلر/ماژول به مدت طولانی در دمای بالا برای کشف مشکلات حرارتی و پایداری.
- کالیبراسیون انکودر: در صورت تعویض قطعات مربوط به فیدبک، کالیبراسیون مجدد صفر انکودرها برای حفظ دقت حرکتی ربات ضروری است.
۵. نصب مجدد و راهاندازی نهایی (Final Startup)
در نهایت، دستگاه به سیستم بازگردانده شده و راهاندازی میشود تا عملکرد آن در شرایط واقعی بررسی شود.
- آپلود نرمافزار (RobotWare Installation): نصب نسخه صحیح و سازگار RobotWare و فایلهای بکآپ (Backup Files) پروژه.
- تست حرکت (Motion Test): اجرای برنامه تست (Test Program) برای اطمینان از حرکت روان و بدون خطای تمامی محورها.
نمونهای از تعمیر کنترلر و کامپیوتر ربات ABB: موردکاوی تخصصی
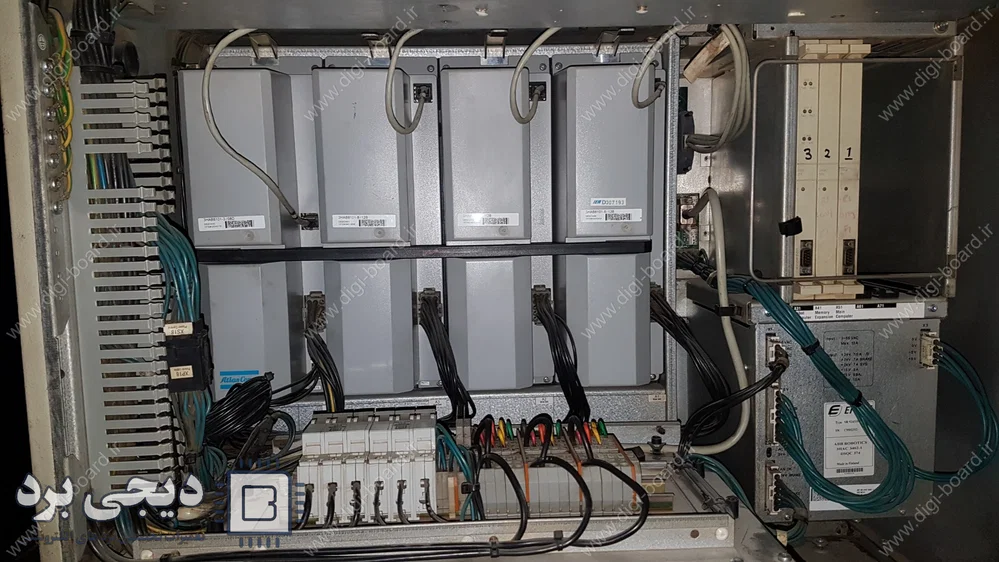
در یکی از پروژههای انجامشده توسط شرکت دیجی برد، کامپیوتر کنترلی مربوط به یک ربات جوشکاری ABB (کنترلر IRC5) که وظیفه کنترل دو بازوی ربات را بر عهده داشت، دچار خرابی شده بود. این کامپیوتر از یکی از شرکتهای فولاد برای تعمیر ارسال شد. پس از انجام مراحل عیبیابی و تعمیرات لازم، دستگاه با موفقیت تعمیر و به مشتری تحویل داده شد.
جزئیات فنی موردکاوی:
- مشکل اولیه: عدم بوت شدن سیستم و نمایش خطای
38209 (Main Computer Board Fault) در LEDهای وضعیت.
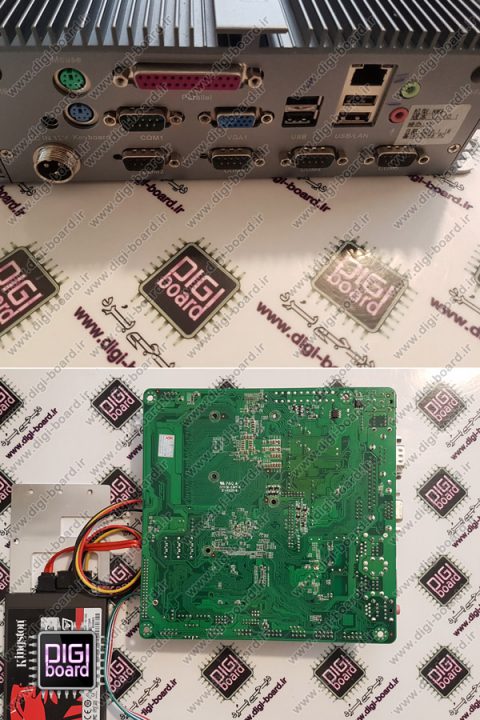
- تشخیص ریشهای: بررسیهای فنی عمیق نشان داد که ایراد ناشی از خرابی چیپست مدیریت حافظه (Memory Controller) بر روی برد MOC (Main Computer Board) بود که به دلیل نوسانات متناوب ولتاژ آسیب دیده بود.
- اقدام عملیاتی: با استفاده از ایستگاه هوای گرم و ابزارهای BGA Rework، تراشه معیوب از روی برد جدا و یک تراشه جدید و استاندارد صنعتی جایگزین شد. پس از لحیمکاری مجدد، صحت اتصال تراشه با تصویربرداری X-Ray تایید شد.
- تست نهایی: برد MOC در یک کنترلر تست تحت بار حرارتی و عملکردی قرار گرفت و پس از اطمینان از پایداری و عملکرد صحیح، برای نصب مجدد ارسال شد.
توجه به این نکته ضروری است که سپردن تعمیرات به تکنسینهای غیرمتخصص میتواند منجر به خرابیهای بیشتر و حتی غیرقابل تعمیر شدن دستگاه شود. تخصص در عیبیابی سطح قطعه (Component Level) و دسترسی به ابزارهای کالیبراسیون تخصصی، وجه تمایز میان یک تعمیر ساده و یک بازیابی عملکردی مطمئن است.
📢 تعمیر ربات ABB با دیجی برد
پایداری فرآیند تولید شما، نباید قربانی توقفهای ناگهانی شود.
آیا کنترلر یا کامپیوتر ربات ABB شما دچار اختلال شده و زمان با ارزش خط تولیدتان در حال هدر رفتن است؟ تجهیزات پیشرفته رباتیک نیازمند تخصص و دقت در سطح جهانی برای تعمیر هستند. سپردن این تجهیزات حیاتی به مراکز نامعتبر، ریسک خرابیهای جبرانناپذیر و هزینههای مجدد را به همراه دارد.
دیجی برد به عنوان یک مرکز تخصصی و مجهز در حوزه الکترونیک صنعتی، آمادگی دارد تا خدمات تعمیر کنترلر و کامپیوتر ربات ABB شما را با تکیه بر دانش فنی عمیق، تجهیزات عیبیابی پیشرفته (مانند اسیلوسکوپهای چند کاناله، BGA Rework Station و تجهیزات تست تحت بار) و با ضمانت عملکرد پایدار ارائه دهد.
همین حالا با کارشناسان فنی ما تماس بگیرید تا با یک عیبیابی دقیق و تخصصی، رباتهای ABB شما را به حداکثر کارایی بازگردانیم.
























{kind=link}
{kind=link}