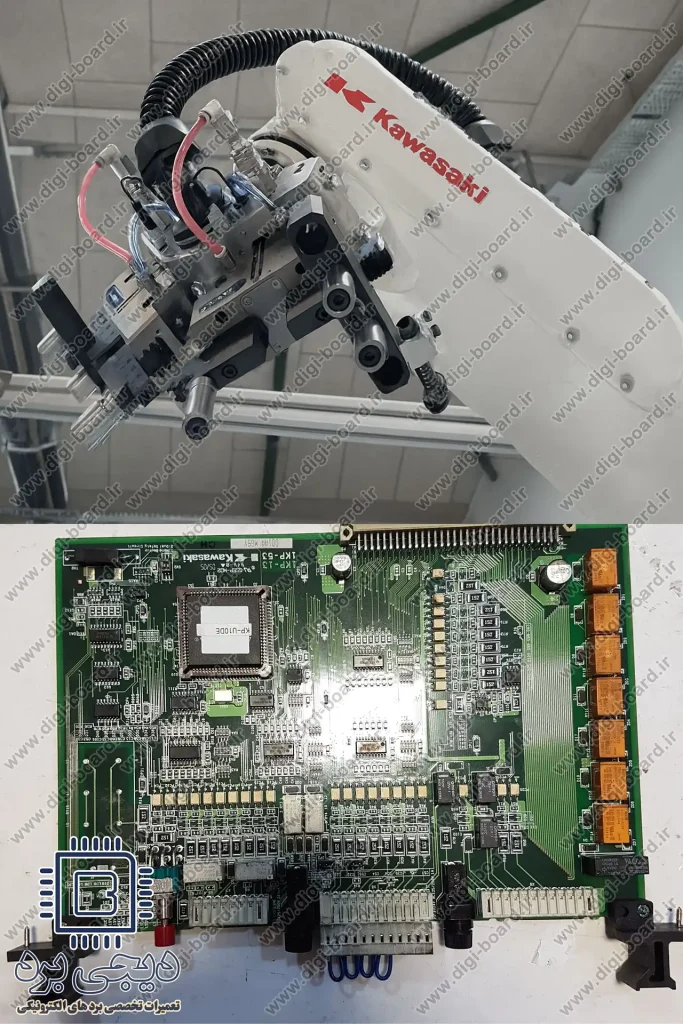
تعمیر ربات کاوازاکی Kawasaki یکی از حوزههای تخصصی در اتوماسیون صنعتی محسوب میشود که نیازمند دانش عمیق در زمینه مکانیک دقیق، الکترونیک صنعتی، درایوها، سروو موتورها و سیستمهای کنترلی پیشرفته است. رباتهای صنعتی Kawasaki بهدلیل دقت بالا، سرعت عملکرد و پایداری در خطوط تولید حساس، در صنایع خودروسازی، جوشکاری، بستهبندی، ماشینکاری و مونتاژ کاربرد گستردهای دارند. هرگونه خرابی در این رباتها میتواند منجر به توقف خط تولید و خسارات قابلتوجه شود؛ بنابراین تعمیر اصولی و فنی آنها اهمیت بالایی دارد.
در این راهنمای تخصصی، ساختار فنی رباتهای کاوازاکی، نحوه عملکرد سیستمها، علل ریشهای خرابیها و مراحل عملی تعمیر بهصورت دقیق بررسی میشود. در بسیاری از پروژههای صنعتی، مراکزی مانند دیجی برد با تجربه عملی در تعمیر تجهیزات اتوماسیون، میتوانند نقش پشتیبان فنی و تخصصی برای تکنسینها ایفا کنند.
آشنایی فنی با ساختار و عملکرد رباتهای صنعتی Kawasaki
رباتهای صنعتی Kawasaki معمولاً از چند زیرسیستم اصلی تشکیل شدهاند که هماهنگی دقیق آنها، عملکرد صحیح ربات را تضمین میکند. درک این ساختار، پایه اصلی عیبیابی اصولی است.
اجزای اصلی ربات Kawasaki
بازوها و مفاصل مکانیکی
ساختار مکانیکی شامل لینکها، گیربکسهای دقیق (RV Reducer یا Harmonic Drive) و یاتاقانها است که حرکت نرم و بدون لقی را فراهم میکند.
سروو موتورها
هر محور ربات توسط یک سروو موتور AC با انکودر دقیق کنترل میشود. این موتورها مسئول حرکت دقیق، شتابگیری و توقف کنترلشده هستند.
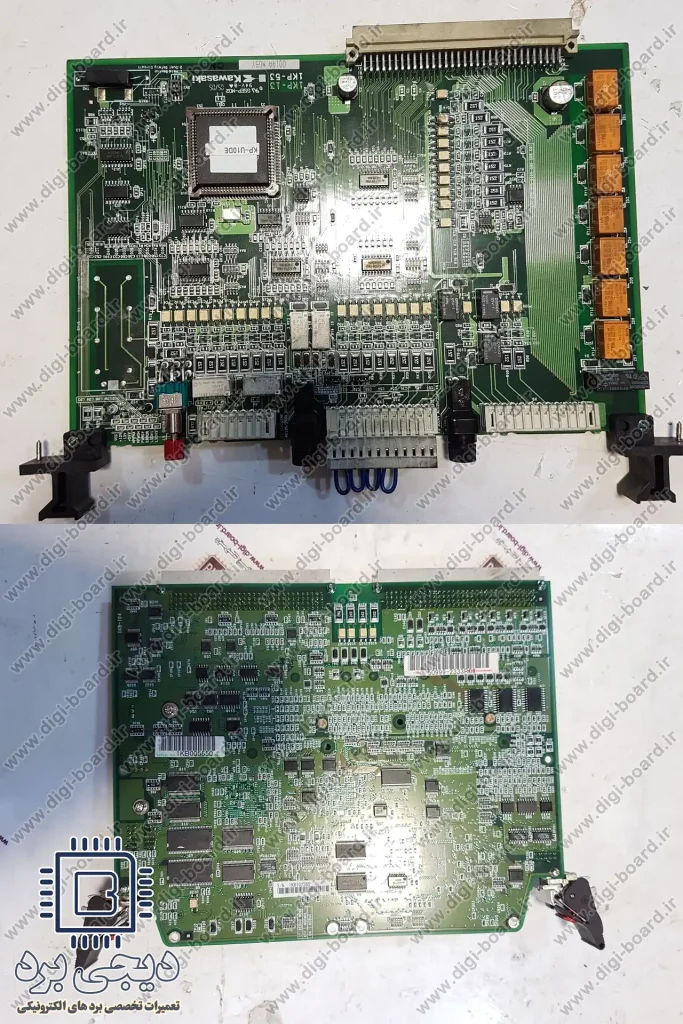
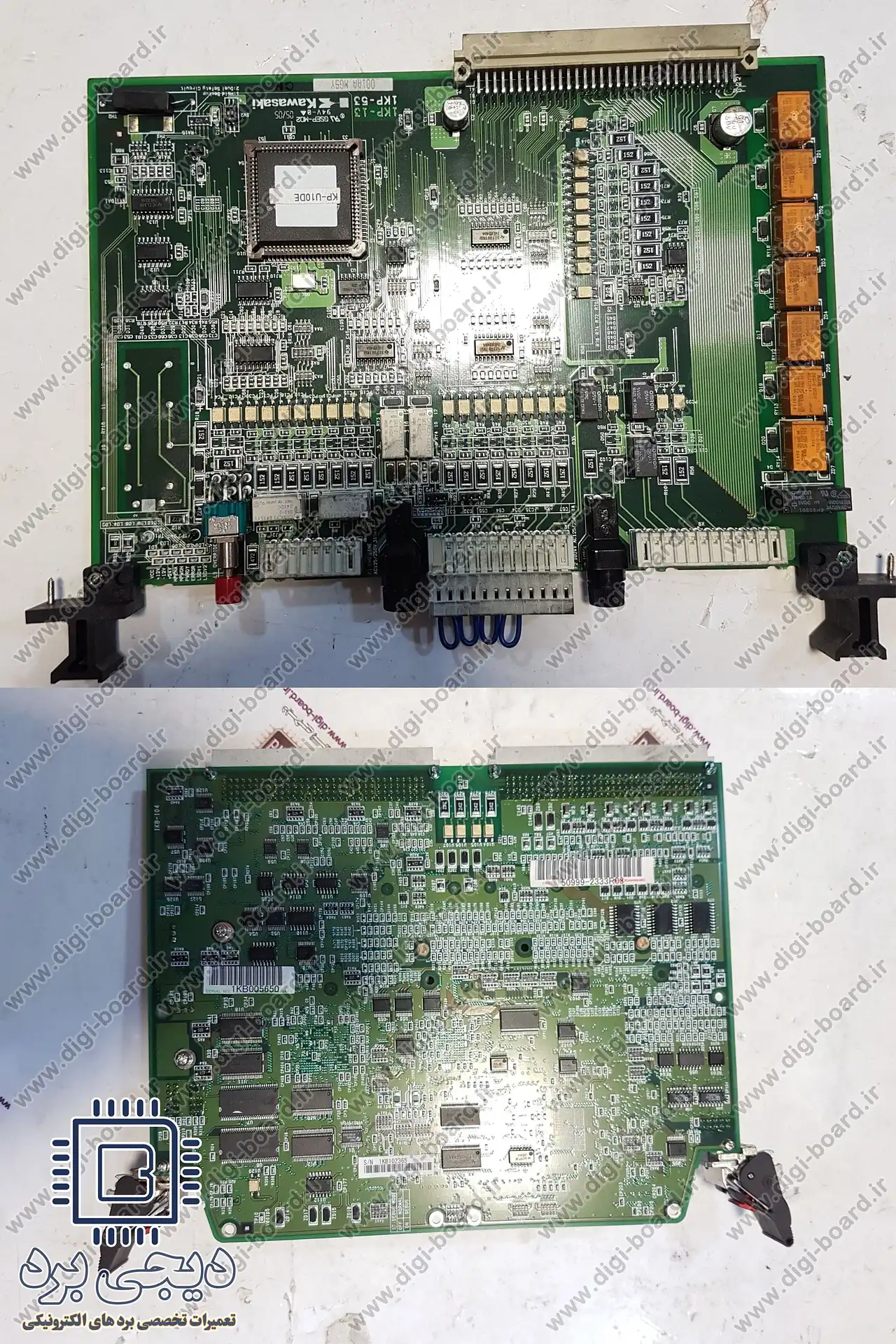
درایوهای سروو
درایوها سیگنالهای کنترلی را از کنترلر دریافت کرده و جریان و ولتاژ مناسب را به سروو موتور ارسال میکنند.
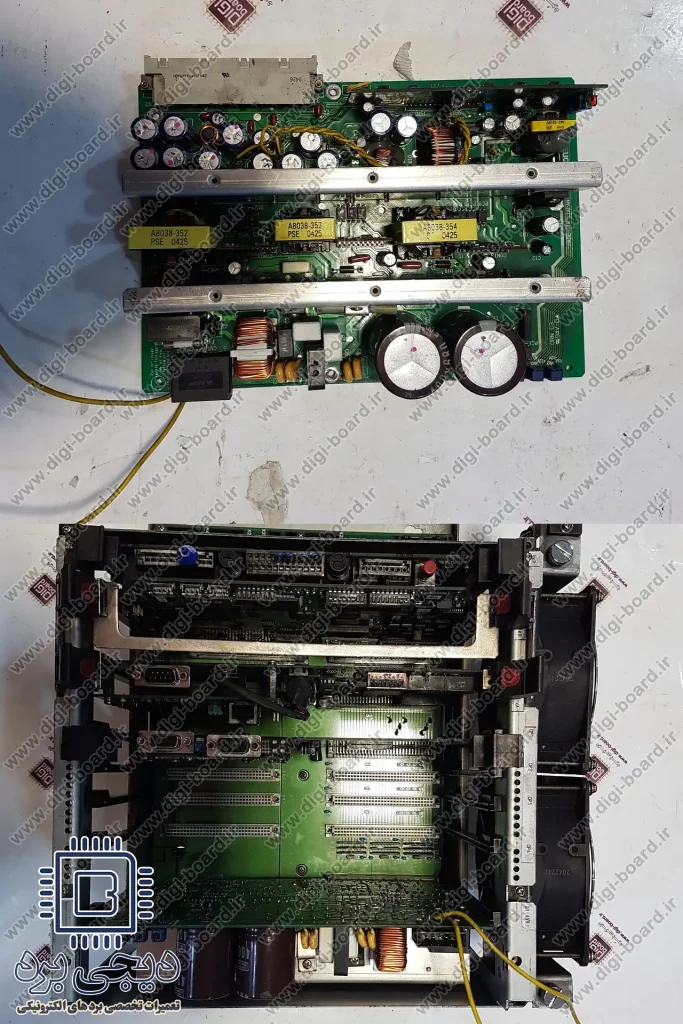
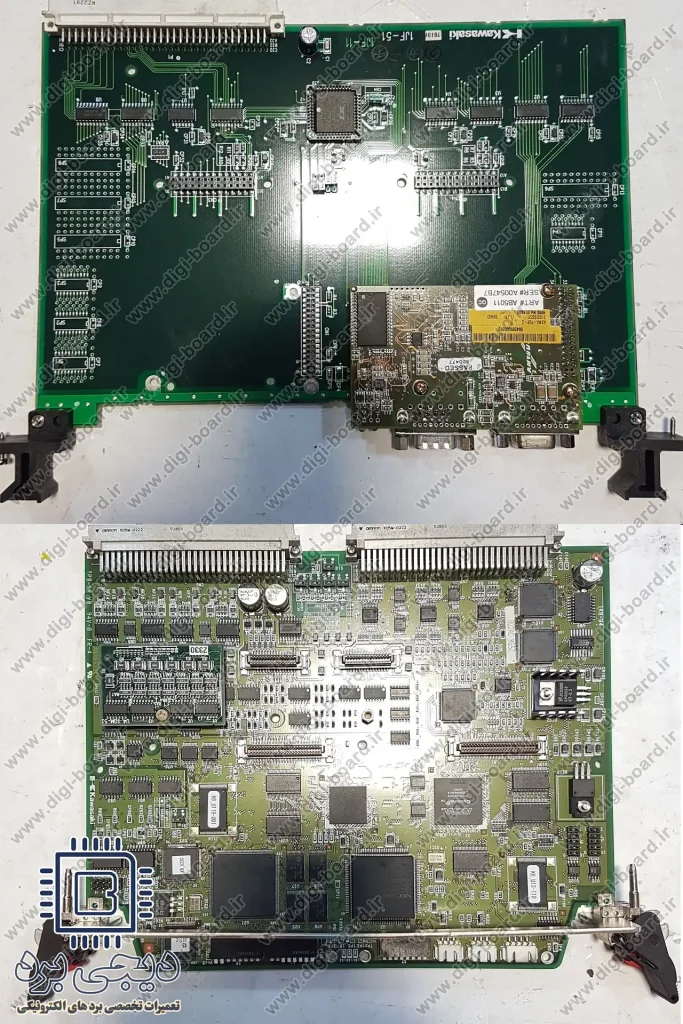
کنترلر مرکزی (Robot Controller)
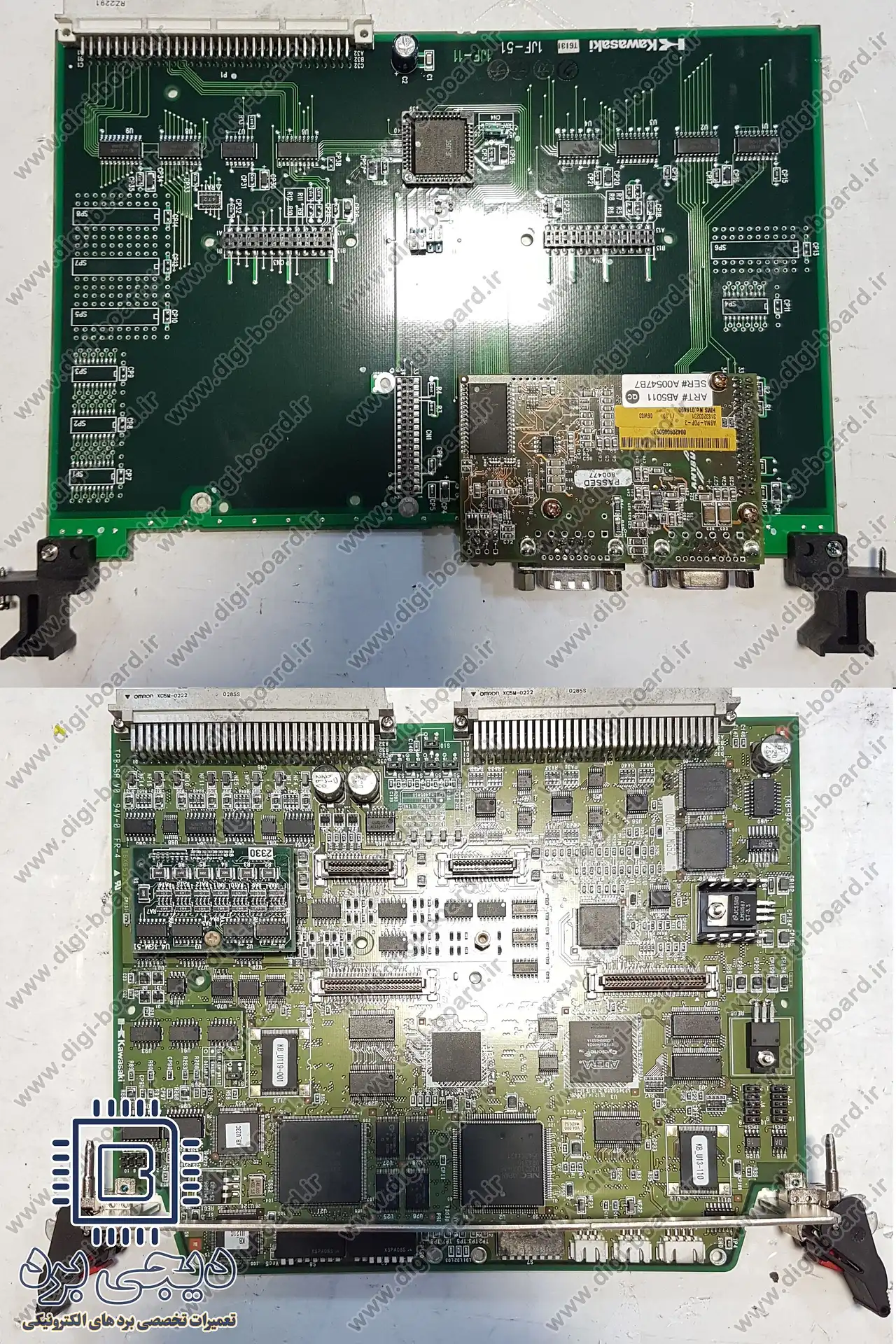
کنترلرهایی مانند E-series یا F-series مغز ربات محسوب میشوند و شامل CPU، بردهای I/O، بردهای پردازش حرکت و مدارهای حفاظتی هستند.
سیستم فیدبک و سنسورها
انکودرها، سنسورهای موقعیت، جریان و دما اطلاعات لحظهای را برای کنترل دقیق حرکت فراهم میکنند.
کابلها و هارنسها
کابلهای فلکس مخصوص حرکت مداوم که ارتباط بین موتور، انکودر و کنترلر را برقرار میکنند.
دیجی برد در پروژههای تعمیراتی، معمولاً تمرکز ویژهای روی بررسی کابلها و درایوها دارد؛ زیرا بخش زیادی از خطاهای متناوب رباتهای Kawasaki از همین نواحی ناشی میشود.
علل ریشهای خرابی در رباتهای Kawasaki
شناخت علت اصلی خرابی، از تکرار مجدد مشکل پس از تعمیر جلوگیری میکند. بسیاری از تعمیرات ناموفق به دلیل عدم توجه به ریشه خرابی هستند.
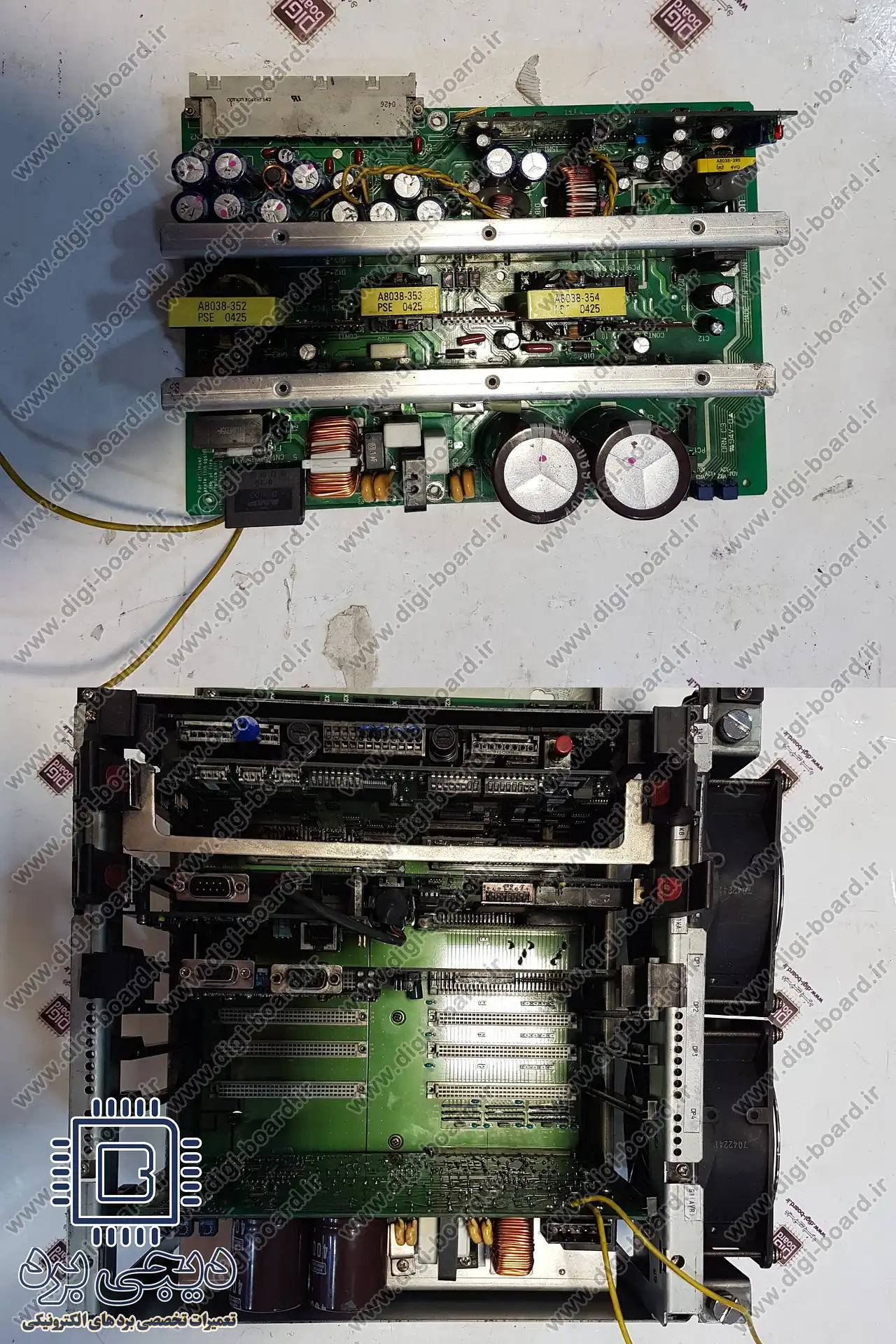
نوسانات برق و کیفیت نامناسب تغذیه
نوسان ولتاژ، قطع و وصل ناگهانی برق یا نبود ارت مناسب میتواند باعث آسیب به درایوها، منبع تغذیه کنترلر و بردهای حساس شود.
استهلاک مکانیکی مفاصل
کارکرد طولانیمدت، بارگذاری بیش از حد یا عدم سرویس دورهای منجر به لقی گیربکسها، افزایش جریان موتور و خطاهای حفاظتی میشود.
خرابی سروو موتور یا انکودر
آلودگی، گرمای بیش از حد یا نفوذ روغن به داخل موتور میتواند باعث خطای موقعیت، لرزش یا توقف ناگهانی محور شود.
آسیب دیدن کابلهای فلکس
کابلهایی که بهطور مداوم خم میشوند، در طول زمان دچار قطعی داخلی یا نویز میشوند و خطاهای متناوب ایجاد میکنند.
اختلالات نرمافزاری یا پارامترها
ریست نادرست، آپدیت اشتباه یا تغییر پارامترهای کنترلی ممکن است باعث رفتار غیرعادی ربات شود.
میتوانید برای دریافت خدمات و یا مشاوره تعمیرات تجهیزات صنعتی به صفحه تعمیرات صنعتی مراجعه کنید.
نشانههای رایج خرابی ربات Kawasaki
-
بروز آلارمهای Servo Error یا Encoder Error
-
توقف ناگهانی ربات حین حرکت
-
کاهش دقت تکرارپذیری (Repeatability)
-
لرزش یا صدای غیرعادی در یکی از محورها
-
عدم راهاندازی کامل کنترلر
-
گرم شدن بیش از حد سروو موتور یا درایو
در مواجهه با این علائم، توصیه میشود تعمیر ربات Kawasaki بهصورت مرحلهای و با ابزار تخصصی انجام شود؛ در غیر این صورت احتمال آسیبهای ثانویه وجود دارد.
مراحل عملی عیبیابی و تعمیر ربات کاوازاکی Kawasaki
مرحله 1: بررسی اولیه و ثبت خطاها
ابتدا تمامی آلارمها و کدهای خطا از روی کنترلر استخراج و ثبت میشوند. این اطلاعات مسیر عیبیابی را مشخص میکند.
مرحله 2: بررسی منبع تغذیه و ورودی برق
-
اندازهگیری ولتاژ ورودی سهفاز
-
بررسی سلامت فیوزها و کنتاکتورها
-
کنترل ارت و نویز الکتریکی
مشکلات این بخش معمولاً باعث خطاهای عمومی و ریست شدن کنترلر میشوند.
مرحله 3: تست درایوهای سروو
در مراکز تخصصی مانند دیجی برد، تست درایوها با بار شبیهسازیشده انجام میشود تا عملکرد واقعی آنها بررسی شود.
مرحله 4: بررسی سروو موتور و انکودر
خرابی انکودر یکی از دلایل شایع خطای موقعیت در رباتهای Kawasaki است.
مرحله 5: بررسی کابلها و کانکتورها
مرحله 6: بررسی بخش مکانیکی
مرحله 7: بررسی نرمافزار و پارامترها
مرحله 8: تست نهایی و راهاندازی
پس از تعمیر، ربات باید در شرایط واقعی خط تولید تست شود:
ابزارهای مورد نیاز برای تعمیر ربات Kawasaki
سوالات متداول درباره تعمیر ربات کاوازاکی
آیا رباتهای Kawasaki قابل تعمیر هستند؟
بله، در اکثر موارد با تعمیر اصولی درایو، سروو موتور یا کنترلر، ربات بهطور کامل قابل بازیابی است.
شایعترین خرابی ربات Kawasaki چیست؟
خرابی کابلهای فلکس، انکودر سروو موتور و درایوهای سروو از رایجترین موارد هستند.
آیا بعد از تعمیر نیاز به کالیبراسیون وجود دارد؟
بله، مسترینگ و تنظیم مجدد محورها برای حفظ دقت ربات ضروری است.
چه زمانی باید ربات به مرکز تخصصی ارسال شود؟
در مواردی مانند خرابی بردهای کنترلر، درایوهای قدرت یا نیاز به تستهای پیشرفته، استفاده از مراکز مجهز توصیه میشود.
تعمیر انواع ربات های صنعتی با دیجی برد
تعمیر ربات کاوازاکی Kawasaki فرآیندی کاملاً تخصصی است که نیازمند شناخت عمیق از سیستمهای الکتریکی، الکترونیکی، مکانیکی و نرمافزاری ربات میباشد. اجرای تعمیرات بدون تحلیل ریشهای خرابی، میتواند منجر به تکرار خطا و کاهش عمر مفید ربات شود. تکنسینهایی که بهدنبال تعمیر پایدار و حرفهای هستند، باید از ابزار مناسب ، روشهای استاندارد و تستهای نهایی دقیق استفاده کنند.
در بسیاری از پروژههای صنعتی، همکاری با مجموعههایی که تجربه عملی، تجهیزات تست پیشرفته و دانش تخصصی در حوزه اتوماسیون دارند، نقش مهمی در کاهش ریسک و زمان توقف خط تولید ایفا میکند. دیجی برد با تکیه بر دانش فنی، تجربه تعمیر انواع رباتهای صنعتی و زیرساخت تخصصی، میتواند گزینهای قابل اتکا برای تعمیر، عیبیابی و پشتیبانی فنی رباتهای Kawasaki باشد. در صورتی که برای تعمیر ربات، بررسی تخصصی یا دریافت مشاوره فنی نیاز به همراهی حرفهای دارید، ارتباط با یک مرکز تخصصی از جمله مرکز ما،دیجی برد، میتواند مسیر تعمیر را سریعتر و مطمئنتر کند.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}