
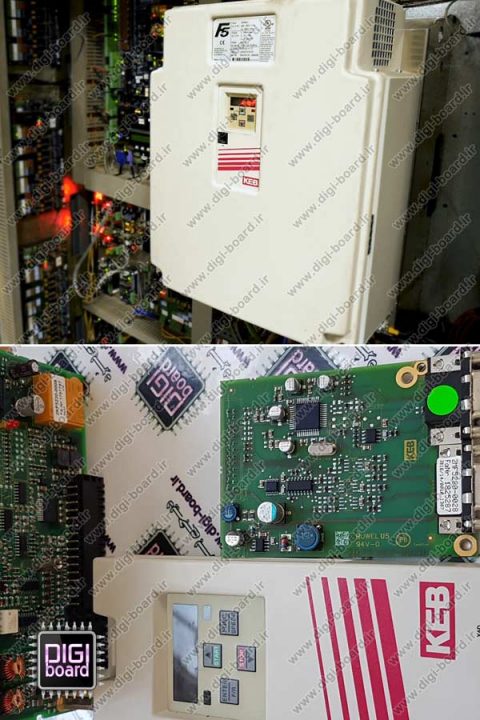


تعمیر سرو درایو کب KEB F5 33KW
تعمیر سرو درایو کب KEB F5 33KW آلمان و تمامی درایوهای صنعتی با توان های مختلف به صورت کاملا تخصصی در کلینیک الکترونیک دیجی برد.این درایو با مشکل E. OP Error! Overvoltage مواجه شده بود که یکی از پیچیده ترین و سخت ترین معایب است گفتی است که سروو درایوی با چنین توان بالایی از بیشترین مدارات حفاظتی و کنترلی برخوردار است .اما با تلاش و بررسی های فراوان این مشکل برطرف گردید.
سرووموتور صنعتی
در کاربردهای مـدرن ، واژه سرو یا مکانیــسم سرو به یک سیستم کنـترلی فیدبک که متغیر کنترل شونده ، موقعیت یا مشتق موقعیت مکانیکی به عنوان سرعت و شتاب است، محدود می شود.یک سیستم کنترلی فیدبک ، سیـستم کنـترلی است که به نگهـداشتن یک رابطه مفروض بین یک کمیت کنـترل شده و یک کمیـت مرجع ، با مقایسه توابع آنها و اسـتفاده از اختلاف به عنوان وسیله کنترل منجر می شود.
سیستم کنـترلی فیدبک الکتریکی ،
عموما برای کار به انرژی الکتـریکی تکیه می کند . مشخصـات مهمی که معمولا برای چنین کنترلی مورد نیاز است ، عبارتند از :
۱- پاسخ سریع ،
۲- دقت بالا ،
۳- کنترل بدون مراقبت و
۴- کارکرد از راه دور .
نیاز های چنین کنترلی عبارتست از :
۱- وسیله آشکار سازی خطا ،
۲- تقویت کننده و
۳- وسیله تصحیح خطا ،
هر عنـصر هدف ویژه ای در هماهنگ کردن کمیت مرجع با کمیت کنترل شده ایفا می کند . وسیله آشکـــارسازی خـطا هنــگامی که کمیـت تنظیم شده متفاوت از کمیت مرجع است ، خطا را آشکار می کند . سپـس یک سیگنـال خطا به تقویت کنـنده ای که قــدرت وسیله تصـحیح خطا را فراهم می کند می فرسـتد . با این تـوان وسیـله تصـحیح خطا ، کمـیت کـنترل شـده را آنـچنـــان تغییر می دهد که با ورودی مرجع هماهنگ گردد .
به موتورهـایی که به سرعـت به سیگنال خطا پاسخ می دهنـد و سریعا به بار شتاب می دهنـد سرو موتور گفته می شود . نسبت گشتاور به اینرسی (T/J) یک جنبه بسیار مهم یک سرو مـوتور است ، زیرا موتور با این فاکتور شتاب می گیرد .
سروو درایو چیست (Servo Drive ) :
سیستم های سروو درایو برای به حرکت در آوردن سروو موتورها ساخته شدند و هم برای موتورها DC کاربرد دارند و هم برای AC اما در صنعت سروو موتورهای اولیه عموما به صورت DC بودند.زیرا سالهای بسیاری کنترل جریان بالا از طریق SCR ها انجام می شد.
هنگامی که ترانزیستورها توانائی کنترل جریان بالا و تبدیل آن به فرکانس بیشتر را یافتند سروو موتورهای AC رواج بیشتری یافتند.
سروو موتورهای اولیه خصوصا برای طراحی تقویت کننده های خودکنترل در اتوماسیون صنعتی مورد استفاده قرار گرفتند.
امروزه می توان دسته ای از این موتورها را برای تقویت کننده های خودکنترل یا کنترل گر با فرکانس متغیر طراحی کرد.
(بدین معنی که موتور می تواند در سیستم خودکنترل و نیز در سیستم فرکانس متغیر کاربردهای متفاوتی داشته باشد)
سرو موتورهای DC :
در بین سرو موتورهای DC مختلف ، موتورهای سـری ، موتورهای سری چــاکدار ، موتور کنترل موازی ، و موتور موازی مغناطیس دائم ( تحریک ثابت ) قرار دارند . این واحدها توان خروجی بالایی نسبت به اندازه آنها تحویل می دهند و در مورد موتــور موازی با تحریک کنترل شده ، توان کنترلی کمی مورد نیاز است .
موتور سری دارای گشتــاور راه اندازی بالایی است و جریان زیادی می کشد و تنظیم سرعت کمی دارد . کارکرد معکوس می تـواند با معکـوس کــردن پلاریتـه ولتاژ میدان با سیم پیچ میدان سری ( یعنی یک سیم پیچ برای هرجهت چرخش ) به دست آید . مــــورد اخیـــر بازده موتور را کاهش می دهد .
موتور سری چاکدار می تواند به عنوان یک موتور تحریک مستقل با میدان کنترل شده به کار گرفته شود . آرمیچر باید از یک منبع جریان ثابت تغذیه شود .
یک منحنی گشتاور سرعت نوعی ، گشتاور ایستای بالا و کاهش سریع گشتاور با افزایش سرعت را نشان می دهد . این امر میرایی خوب و خطای سرعت بالا را نتیجه می دهد .
نوع موازی سروموتور DC از سایر موتورهای موازی برای کارکرد عمــومی متفاوت نیست . این موتور دو سیم پیچی مجزا – سیم پیچی میدان که روی استاتور قرار داده شده و سیم پیچی آرمیچر که روی روتور قرار داده شده – دارد .
هر دو سیم پیچی به یک منبع تغذیه DC متصل شده اند . در یک موتور DC موازی معـمولی ، دو سیم پیچی به صورت موازی به تغذیه DC اصلی متصل شده اند . اما در یک کارکرد سرو ، سیم پیچی ها با منابع DC جداگانه ای تغذیه می شوند ،جهـت چرخـش موتـور اگر پلاریـته میـدان معـکوس شود عکس می شود.آرمیچر موتور با سیگنال تقویت شده خطا ومیدان از یک منبع جریان ثابت تغذیه می شوند .
پاسخ دینامیکی درموتور نوع کنترل شده میدان سریعتر است ، زیرا مـدار آرمیچـر لزومـا یک مـدار مقاومتی است وثابـت زمانی کوتاهـتری دارد . اگر پلاریـته سیگنـال خطا معـکوس گردد ، موتور در جهت معکوس می چرخد .
موتور مغنـاطیس دائـم یک موتور تحریک ثابت موازی است که میـــدان با یک مغناطیس دائم تغذیه می شود . کارکرد شبیه به موتور با مـیدان ثابت و آرمیچر کنترل شده است.
سروموتورهای AC :
سروموتورهای AC همانطـور که قبلا ذکر شد انتخاب مناسبی برای کاربـــردهای با توان پایین هستند و به همین دلیل است که موتورهای AC همیشه به موتورهای DC ترجیح داده میشوند. مزایای سروموتورهای AC به سروموتورهایDC شامل موارد زیر است :
۱- روتورهای قفس سنجابی ساده هستند و در مقایسه با سیم پیچی آرمیچر ماشینهای DC از نظر ساختاری ، محکمتر هستند.
۲- سروموتورهای AC دارای جاروبک برای کموتاسیـون نیستنـد و نیاز به تعمیر ونگهداری دائم ندارند.
۳- هیچ عایقی در اطراف هادی آرمیچر آنچنان که در موتور DC وجود دارد نیست پـس آرمیـچر می تواند بسیار بهتر گرما را پخش کند.
۴- بدلیل اینکه آرمیـچر، سیـم پیچی های عایـق دار پیچـیده ای ندارد ، قطر آن می توانـد برای کاهش اینرسی روتور بسیار کاهش یابد . این امر به جلوگیری از Over Shoot در مکـانیسم سـرو کمک می کند .
یک سروموتور AC اصولا یک موتور دوفاز القایی است به جز در مورد جنبههای خـاص طراحی آن.
توان مکانیکی خروجی یک سروموتور AC از ۲ وات تا چند صد وات تغییر می کند . مــوتورهای بزرگتر از این توان بسیار کم بازده اند واگربامشـخصات گشتـاورسرعت مطلوب ساخته شده باشند برای استفاده در کاربردهای سرو بسیار مشکل ساز خواهند شد . سرو موتورهای دقیق در کامپیوترها ابزارهای سرو و شماری ازکاربردها که به دقت بالایی نیاز است بکار می روند.
مشکلات سرو درایوها:
-
درایو روشن نمی شود
-
ارور Over voltage
-
ارور Power factor control
-
مشکل over current
-
Error brake
-
مشکل ERROR drive overheat
-
مشکل با انکودر سروو
نمونه تعمیرات و مطالب مرتبط








نمونه تعمیرات و مطالب مرتبط
 تعمیر و عیب یابی ربات های صنعتی و الکترونیک ربات Robot
تعمیر و عیب یابی ربات های صنعتی و الکترونیک ربات Robot
 تعمیر کامپیوتر خودرو ECM ECU ای سی یو
تعمیر کامپیوتر خودرو ECM ECU ای سی یو
 تعمیر دستگاه دیالیز
تعمیر دستگاه دیالیز
 تعمیر تخصصی خودروهای هیبرید Hybrid الکترونیک
تعمیر تخصصی خودروهای هیبرید Hybrid الکترونیک
 تعمیر تخصصی پورشه Porsche الکترونیک
تعمیر تخصصی پورشه Porsche الکترونیک
 تعمیر تجهیزات الکترونیکی دکل حفاری نفت
تعمیر تجهیزات الکترونیکی دکل حفاری نفت
 تعمیر ای سی یو ECU یونیت های کنترل خودرو ها و ماشین آلات سنگین
تعمیر ای سی یو ECU یونیت های کنترل خودرو ها و ماشین آلات سنگین
 تعمیر ECU ای سی یو دیزل ژنراتور Diesel generator
تعمیر ECU ای سی یو دیزل ژنراتور Diesel generator
آخرین مطالب
-
۲۱ بهمن ۰۱
 تعمیر فرمان برقی EPS خودرو
تعمیر فرمان برقی EPS خودرو
-
۰۴ تیر ۰۱
 تعمیر دستگاه کروماتوگرافی گازی GC
تعمیر دستگاه کروماتوگرافی گازی GC
-
۲۹ بهمن ۰۰
 بردهای تجهیزات صنعتی
بردهای تجهیزات صنعتی


{kind=link}
{kind=link}
{kind=link}