سیستم رادار نقطه کور (Blind Spot Detection – BSD) هیوندای النترا یکی از تجهیزات ایمنی مهم در این خودرو است که به منظور کاهش تصادفات ناشی از نقاط کور طراحی شده است. این سیستم با بهرهگیری از سنسورها و ماژولهای راداری، وجود موانع یا خودروهای دیگر را در محدوده نقاط کور شناسایی کرده و هشدار لازم را به راننده ارسال میکند. خرابی در رادار نقطه کور میتواند باعث اختلال در هشداردهی و کاهش ایمنی رانندگی شود. در ادامه به بررسی انواع ایرادات رایج رادار نقطه کور النترا و روند تخصصی تعمیر هر یک پرداخته میشود.
مشکلات رایج رادار نقطه کور هیوندای النترا و روند تعمیر
۱. سیستم BSD فعال نمیشود
علت احتمالی مشکل:
عدم دریافت تغذیه الکتریکی صحیح توسط ماژول رادار
قطع شدن ارتباط شبکه CAN با ECU رادار
خرابی داخلی ماژول رادار نقطه کور
تنظیمات نادرست نرمافزاری یا غیرفعال شدن سیستم از منوی تنظیمات خودرو
روند تعمیر:
بررسی ولتاژ تغذیه ورودی به ماژول رادار با ولتمتر؛ رفع اشکال در سیمکشی یا جایگزینی فیوز معیوب
اسکن شبکه CAN خودرو با دستگاه دیاگ و رفع اختلالات احتمالی در ارتباط ECU رادار با سایر یونیتها
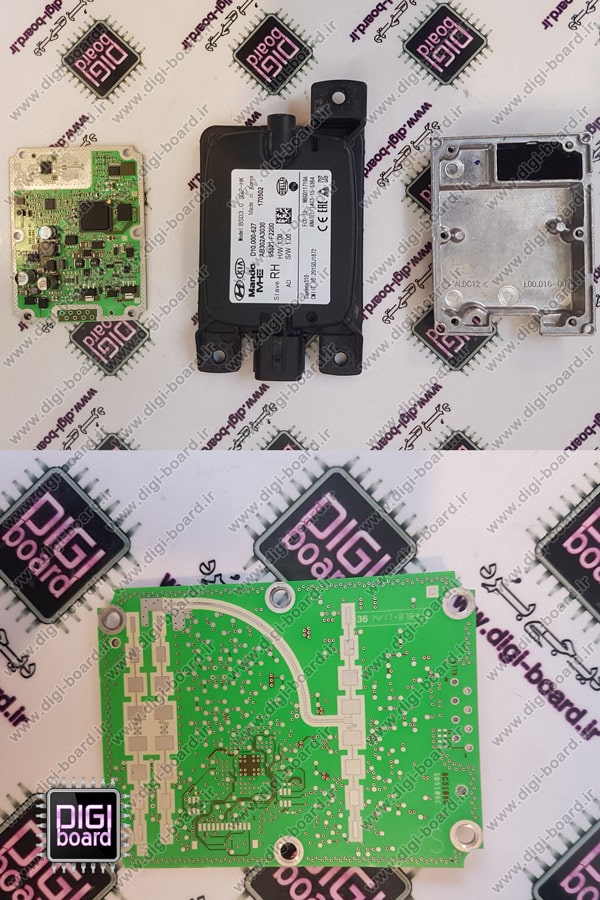
تست عملکرد سختافزاری ماژول رادار و تعویض ماژول در صورت معیوب بودن (کد قطعه: ۹۵۸۲۱F2200)
ریست و فعالسازی مجدد سیستم BSD از طریق منوی تنظیمات یا دستگاه دیاگ
تست عملکرد نهایی سیستم پس از تعمیر با شبیهسازی حضور مانع در محدوده نقاط کور
۲. رادار نقطه کور کالیبره نمیشود
علت احتمالی مشکل:
نصب نادرست ماژول رادار یا پایههای آن
خطای سنسورهای جانبی در ارسال دادههای محیطی
اختلاف در زاویه نصب نسبت به تنظیمات پیشفرض کارخانه
مشکلات نرمافزاری در پروسه کالیبراسیون
روند تعمیر:
بررسی دقیق محل نصب ماژول رادار و پایههای نصب شده روی سپر عقب خودرو؛ تنظیم زاویه مطابق با استاندارد کارخانه
انجام کالیبراسیون با دستگاه دیاگ تخصصی (GDS یا OBD پیشرفته)
بررسی و رفع خطای نرمافزاری با بهروزرسانی سیستم ECU رادار
تست سنسورهای جانبی در بخشهای دیگر سیستم کمکی رانندگی و اطمینان از صحت عملکرد آنها
انجام تست جادهای جهت صحت کالیبراسیون رادار پس از اتمام مراحل تنظیم
۳. رادار نقطه کور مرتب از کالیبره خارج میشود
علت احتمالی مشکل:
تغییر در محل یا زاویه نصب به دلیل ضربه به سپر عقب یا تعویض قطعات بدنه
اختلال در ارتباط دادهای بین ECU رادار و شبکه مرکزی خودرو
نویز الکترومغناطیسی یا تداخل سیگنال از دیگر تجهیزات نصب شده بر روی خودرو
روند تعمیر:
بررسی صحت نصب و موقعیت ماژول رادار نسبت به تنظیمات اولیه کارخانهای
تست کامل شبکه ارتباطی CAN و رفع اختلالات دادهای
نصب فیلترهای حذف نویز در مسیر تغذیه و کابلهای سیگنال ECU رادار
بهروزرسانی نرمافزار ECU رادار جهت پایدارسازی کالیبراسیون
انجام تست جادهای و تحلیل رفتار سیستم در شرایط واقعی رانندگی
۴. عدم ارتباط دستگاه دیاگ با رادار نقطه کور
علت احتمالی مشکل:
قطعی در شبکه CAN BUS خودرو
سوختگی یا خرابی آیسی درایور CAN در ECU رادار
ناسازگاری دستگاه دیاگ با پروتکل ارتباطی BSD سیستم هیوندای النترا
روند تعمیر:
بررسی کامل سیمکشی CAN و رفع اتصالات معیوب یا قطعی در مسیر
تست و تعویض آیسی ترانسیور CAN در ECU رادار
اطمینان از استفاده از دستگاه دیاگ معتبر و بهروز (مانند GDS) که از پروتکل ارتباطی BSD پشتیبانی میکند
انجام ریست کامل سیستم و برقراری مجدد ارتباط با ECU رادار از طریق دیاگ
۵. خطای مکرر در نمایش هشدار نقاط کور (هشدارهای اشتباه)
علت احتمالی مشکل:
کالیبره نبودن سنسورهای رادار یا تنظیمات اشتباه در محدوده تشخیص
بازتاب سیگنال رادار از اجسام غیرمتحرک مانند گاردریل یا دیوارها
ضعف یا خرابی در نرمافزار پردازش سیگنال ECU رادار
روند تعمیر:
بررسی و تنظیم مجدد محدوده شناسایی و حساسیت سیستم با دیاگ
آپدیت نرمافزار ECU رادار به آخرین نسخه جهت بهبود الگوریتم پردازش سیگنال
تست عملکرد سیستم در شرایط متفاوت جادهای و حذف خطاهای احتمالی نرمافزاری
بررسی و تعویض ماژول رادار در صورت وجود خرابی سختافزاری
اکثر دوستانی که با مرکز ما برای طرح مشکل خودرو خود ارتباط می گیرند ، نمی دانند که چطور و از کجا شروع به عیب یابی خودرو خود کنند ، در اینجا سعی می کنیم تا شما و همه دوستانی که برای پیدا کردن عیب خودرو خود دچار این سردرگمی هستند را به زبان ساده راهنمایی کنیم. چطور خودرو خود را عیب یابی کنیم؟
تعمیر ای سی یو ECU یونیت های کنترل خودرو ها و ماشین آلات سنگین : در سالهای اخیر، ماشینهای سنگین از سیستمهای کاملا مکانیکی به سمت سیستمهای پیچیدهی کامپیوتری و الکترومکانیکی پیش رفته اند. نیازهای روزافزون در موارد ایمنی و محیطی منجر به تولید زیر شاخه هایی از سیستم های الکترونیک ای شد که توسط ECU و CanBusهماهنگ می شوند.









")














