پهپادها و کوادکوپترها به دلیل استفاده گسترده در تصویربرداری هوایی، نقشهبرداری، ماموریتهای صنعتی و تفریحی، نیازمند عملکرد دقیق و پایدار هستند. بردهای الکترونیکی اصلی در این پرندهها شامل سیستمهای کنترل پرواز، GPS، پردازشگرها، ژیروسکوپها، سیستم ناوبری و ماژولهای ارتباط رادیویی میباشند. محبوب ترین برند های موجود در بازار ایران عبارتند از:
DJI (دیجیآی) – چین مدلهای محبوب:
Mavic 3 Pro → مجهز به دوربین سهگانه با کیفیت 5.1K، مناسب برای فیلمبرداری حرفهای
Mini 2 SE → کوادکوپتر سبک و قابلحمل با کیفیت تصویر مناسب، مناسب برای کاربران مبتدی و نیمهحرفهای
Air 3 → دارای دوربین دوگانه و زمان پرواز بالا، مناسب برای تصویربرداری هوایی با کیفیت بالا
MJX (امجیایکس) – چین مدلهای محبوب:
Bugs 20 EIS → دارای سیستم تثبیت تصویر الکترونیکی و دوربین 4K، مناسب برای فیلمبرداری با کیفیت بالا
Bugs 16 Pro → مجهز به GPS و دوربین 4K، مناسب برای کاربران حرفهای
Bugs 5W → دارای دوربین HD و قابلیتهای پروازی متنوع، مناسب برای کاربران نیمهحرفهای
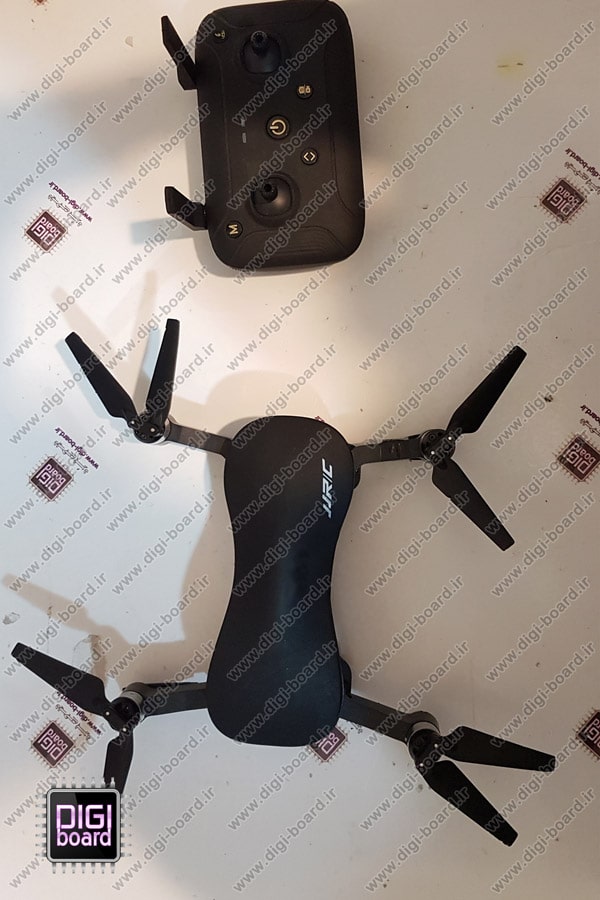
JJRC (جیجیآرسی) – چین مدلهای محبوب:
X12 Aurora → دارای GPS و دوربین 4K، مناسب برای تصویربرداری هوایی با کیفیت بالا
X17 → مجهز به دوربین 6K و گیمبال سهمحوره، مناسب برای فیلمبرداری حرفهای
H68 → کوادکوپتر اقتصادی با دوربین HD، مناسب برای کاربران مبتدی
Hubsan (هابسان) – چین مدلهای محبوب:
Zino Pro → دارای دوربین 4K و برد کنترل بالا، مناسب برای فیلمبرداری حرفهای
Zino Mini Pro → کوادکوپتر سبک با دوربین 4K، مناسب برای کاربران نیمهحرفهای
H501S → مجهز به GPS و دوربین HD، مناسب برای کاربران مبتدی
Syma (سایما) – چین مدلهای محبوب:
X31 → کوادکوپتر مناسب برای مبتدیان با قابلیتهای پروازی پایه و قیمت مناسب
X500 Pro → دارای دوربین HD و قابلیتهای پروازی پیشرفته، مناسب برای کاربران نیمهحرفهای
S91 EVO → مجهز به موتور براشلس و دوربین دوگانه، مناسب برای تصویربرداری با کیفیت متوسط
ZLRC (زدالآرسی) – چین مدلهای محبوب:
SG906 Pro 2 → دارای دوربین 4K و گیمبال سهمحوره، مناسب برای تصویربرداری حرفهای
SG108 → کوادکوپتر سبک با دوربین HD، مناسب برای کاربران مبتدی
SG907 → مجهز به دوربین 4K و قابلیتهای پروازی پیشرفته، مناسب برای کاربران نیمهحرفهای
Autel Robotics (اوتل رباتیکس) – آمریکا مدلهای محبوب:
EVO II Pro → دارای دوربین 6K و سنسور بزرگ، مناسب برای فیلمبرداری حرفهای
EVO Nano+ → کوادکوپتر سبک با دوربین 4K، مناسب برای کاربران نیمهحرفهای
EVO Lite+ → مجهز به دوربین 6K و قابلیتهای پروازی پیشرفته، مناسب برای تصویربرداری هوایی با کیفیت بالا
با توجه به پیچیدگی این سیستمها، هرگونه خرابی یا اختلال نیاز به عیبیابی تخصصی و تعمیر دقیق دارد. در این محتوا مشکلات رایج و روند تعمیر بردهای پهپاد و کوادکوپتر به طور کامل بررسی شده است.
مشکلات رایج در بردهای پهپاد و کوادکوپتر و روند تعمیر آنها
1. برد کنترل پرواز (Flight Controller) کار نمیکند
علت احتمالی:
سوختگی مدار تغذیه برد
خرابی پردازنده مرکزی (MCU) یا حافظه داخلی
قطع شدن مسیرهای ارتباطی با سنسورها و GPS
خطای نرمافزاری در Firmware کنترل پرواز
روند تعمیر:
بررسی ولتاژ ورودی برد کنترل و تست ماژول تغذیه
تعویض یا تعمیر پردازندههای مرکزی و حافظههای آسیبدیده
تست اتصالات داخلی و رفع قطعی یا آسیب مسیرهای مدار چاپی
فلش کردن مجدد Firmware و انجام کالیبراسیون پروازی
2. عدم دریافت سیگنال GPS یا خطای موقعیتیابی
علت احتمالی:
خرابی آنتن GPS یا قطع شدن کابل متصل به ماژول GPS
آسیب ماژول GPS بر اثر ضربه یا نفوذ آب
نویز الکترومغناطیسی یا اختلال در شبکههای ارتباطی
خطا در پردازش دادههای مکانیابی توسط برد اصلی
روند تعمیر:
تست سیگنال GPS با دستگاه آنالیز موقعیت
تعویض آنتن GPS یا تعمیر کابلهای معیوب
بررسی نویز و ایزولاسیون سیستم تغذیه برای کاهش اختلالات
بهروزرسانی نرمافزار مکانیابی و کالیبراسیون مجدد GPS
3. خرابی سیستم ژیروسکوپ و عدم تعادل پرواز
علت احتمالی:
خرابی سنسور ژیروسکوپ یا شتابسنج
خطای کالیبراسیون در ماژول کنترل پرواز
آسیب به برد سنسور در اثر ضربه شدید
خطا در نرمافزار تحلیل دادههای حرکتی
روند تعمیر:
تست سنسور ژیروسکوپ با دستگاه کالیبراتور
تعویض سنسورهای ژیروسکوپ یا شتابسنج
بهروزرسانی نرمافزار کنترل پرواز و انجام کالیبراسیون مجدد
اطمینان از نصب صحیح برد ژیروسکوپ بدون لرزش یا نویز مکانیکی
4. اختلال در سیستم ارتباط رادیویی (ریموت کنترل)
علت احتمالی:
خرابی ماژول گیرنده رادیویی در پهپاد
قطع یا خرابی آنتن ارتباطی
تداخل سیگنال با دستگاههای دیگر
خطای هماهنگی بین فرکانس ریموت و سیستم کنترل پرواز
روند تعمیر:
تست قدرت سیگنال و برد آنتن با آنالایزر فرکانس
تعویض ماژول گیرنده و آنتن آسیبدیده
تغییر فرکانس کاری جهت جلوگیری از تداخل
تنظیم مجدد و همگامسازی (Binding) بین ریموت و پهپاد
5. مشکلات برد کنترل سرعت موتور (ESC)
علت احتمالی:
خرابی برد ESC بر اثر نوسانات جریان یا اتصال کوتاه
آسیب ماسفتها و ترانزیستورهای قدرت
مشکل در فریمور ESC و ارسال دستورات غلط به موتور
قطع ارتباط بین کنترلر پرواز و ESC
روند تعمیر:
بررسی جریان ورودی و خروجی ESC با مولتیمتر
تعویض ماسفتها و ترانزیستورهای معیوب
فلش کردن مجدد Firmware ESC
تست عملکرد موتورها پس از تعمیر برد ESC و کالیبراسیون مجدد سرعت موتور
6. دوربین و سیستم انتقال تصویر کار نمیکند
علت احتمالی:
قطع شدن ارتباط کابلهای FPV یا خراب شدن کانکتورها
خرابی ماژول دوربین بر اثر ضربه یا نفوذ رطوبت
آسیب ماژول انتقال تصویر (VTX) یا تداخل فرکانس ارسال
خطا در سیستم ذخیرهسازی تصویر یا کارت حافظه
روند تعمیر:
بررسی کابلهای اتصال بین دوربین، VTX و سیستم کنترل
تعویض دوربین یا ماژول انتقال تصویر در صورت خرابی
تنظیم مجدد کانالهای فرکانس انتقال تصویر برای جلوگیری از تداخل
تست و تعویض کارت حافظه معیوب یا رفع خطاهای فایل سیستم
روند کلی تعمیر بردهای پهپاد و کوادکوپتر در دیجی برد
بررسی و تست اولیه
شناسایی عیوب ظاهری و تست پایه بردها، موتورهای کوادکوپتر و سیستمهای کنترلی.
عیبیابی تخصصی با تجهیزات دقیق
استفاده از آنالایزرهای سیگنال، مولتیمتر صنعتی، تستر GPS و سیستم عیبیاب CAN Bus برای تشخیص خرابیهای دقیق در بردهای اصلی.
تعمیر یا تعویض قطعات معیوب
شامل تعویض آیسیها، پردازندهها، ماژولهای GPS، سنسورها، ESCها و ماژولهای ارتباط رادیویی.
فلش کردن مجدد Firmware و نرمافزار سیستم
بارگذاری مجدد نرمافزار کنترل پرواز، ESC و ماژولهای GPS جهت رفع خطاها و ارتقاء کارایی.
کالیبراسیون نهایی و تست پروازی
انجام کالیبراسیون ژیروسکوپ، GPS، سنسورها و موتورهای کوادکوپتر و تست کامل پرواز جهت اطمینان از رفع کامل مشکلات.
نکات مهم جهت افزایش عمر و سلامت بردهای پهپاد و کوادکوپتر
جلوگیری از نفوذ رطوبت و آب به داخل بدنه و بردها
شارژ باتریها با شارژرهای استاندارد و جلوگیری از نوسانات ولتاژ
پرواز در مناطق عاری از تداخل فرکانسی برای حفظ کیفیت ارتباط رادیویی
نگهداری صحیح از آنتنها و کابلهای ارتباطی
بررسی و سرویس دورهای سنسورها، موتورهای ESC و ماژولهای GPS
PLC یا کنترلگر منطقی برنامه پذیر، یک کامپیوتر دیجیتال است که برای خودکارسازی فرآیندهای مختلف الکترو-مغناطیسی در کارخانه ها استفاده می شود.
سیستم پی ال سی دارای خطوط ورودی می باشد. سنسورهایی به این ورودی ها وصل میشوند تا اتفاقات در حال جریان را(مانند دما بالا/زیر مقداری مشخص یا سطح مورد انتظار مایع در تانکر) به PLC اطلاع دهند.همچنین این دستگاه دارای خروجی هایی است که عملگرهایی به آنها وصل شده اند تا نسبت به ورودی ها واکنش نشان دهند.(مانند روشن کردن یک موتور، باز و بسته کردن یک شیر و...)









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}